
An Advanced hybrid Vehicle with Electric Motors in Each Wheel
All inventors eventually have ideas for cars. This ‘4 Wheel Flex’ chassis incorporates many of our pet car ideas. Feel free to take any of them.
It is a radical new suspension system for hybrid cars and SUVs. A drive motor integrated into each wheel allows new flexibility in the layout of suspension components and saves weight and complexity. These motors are just becoming available but will probably become universal in vehicles within the next decade. Active suspension compensates for small tires.
For passenger cars the chassis creates banked turns for comfort like a boat or motorcycle, allows parking in impossibly tight spots, low rides on smooth roads for reduced air resistance and better mileage and top speed, turns literally on a dime. No brakes except the motors.
For off road or SUV vehicles it allows compensation for steep slopes and although it has small wheels, if the going is really rough it should be able to walk over terrain that no other wheeled vehicle can handle.
We are showing this concept in confidentiality to a few manufacturers. If you are interested in any of these (not patented yet) ideas, please contact Ron Milner at Applied Design Labs, Grass Valley CA. My e-mail is ron2007@applied design.com (only put a dash between applied and design.)
Concept
An automobile that uses powerful electric motors (such as are produced by Magnet-Motor GmbH , and on which Michelin based a recent concept car, and E-Traction of the Netherlands) which are mounted inside the hub of each wheel, and are the sole means of providing motion. This eliminates the need for any type of driveline, and this new freedom in design opens several interesting options we will take advantage of:
1. Superior four wheel steering (4ws). Current 4ws designs are limited by the small amount of rotation in the back wheels and hence have a subtle effect on maneuverability. With 90+ degrees of motion in each direction, very tight turns and even turning around the center axis of the vehicle (like a treaded vehicles, and Jeep’s latest concept vehicle, the “Jeep Hurricane” that is touted to spin on a dime) is possible. Steering would be entirely “drive by wire” ie; controlled by microprocessors using algorithms for the correct rotation of each wheel for different tasks, such as parallel parking in spots that nobody else can, tight turns, stable turning at high speed, and spinning around the vehicles center. A steering system like this would be especially beneficial for large vehicles that are awkward to navigate in tight quarters.
2. Active Suspension. Our vehicle’s suspension’s range of motion can be extended dramatically beyond conventional vehicles by not being attached to axles, CVs, or steering mechanisms. An electro magnetic suspension, such as has been pioneered and successfully tested by Bose, would be a good choice (read more about Bose’s active suspension system) The Bose suspension uses linear magnetic motors and an internal power amplifier to create a strong suspension system that can react very quickly to bumps and irregularities in the road (or off road), and can by controlled by a computer processor. A hydraulic suspension for lower speed extension would be powerful enough to easily lift the vehicle smoothly. The extreme rotation of the 4ws requires being able to lift the vehicle to allow the wheels to turn without hitting the wheel well, rather than having to create large space consuming wheel wells. The suspension may also be lowered for normal driving, and raised for driving over rough terrain, snow, deep water, or to get a better view of a situation (like cars in traffic). Lowering the suspension to its minimum clearance would improve handling for high speed highway or autobahn driving. The car could even lean toward the inside of corners, like a motorcycle. To improve traversing steep inclines off road, one side of the suspension could be lowered while the other is raised, decreasing the likelihood of rolling the vehicle, a problem that jeeps have. The stiffness of the suspension may be automatically or manually adjusted for different handling options.
|
|
|
|
|
|

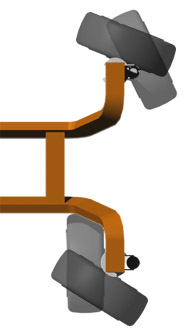
3. Walking. With the existing features in place on a vehicle it would be a simple matter to add another hydraulic cylinder and hinge on each wheel assembly near where it meets the frame to be able to swing each wheel front to back approximately 30 degrees in each direction. With the wheels locked to prevent slipping, and using the hydraulic suspension, the vehicle could then walk over obstacles or rough terrain. The clearance of the vehicle and how high it can step is decided by the length of the suspension’s hydraulic cylinders. For normal driving, the hinges that swing the wheels would be mechanically locked and the wheels would unlock.
|
|
|
|
|
|

- Energy recovering braking. Instead of using brakes that turn the kinetic energy of the car into heat (and waste this potential energy) while stopping, the motors become generators and charge the battery, partially recovering the energy it took to initially accelerate the vehicle, and stop the vehicle at the same time. This isn’t a new idea, but would work well with this design, and is a sensible feature for any electric automobile.
The weight of the wheel motors dictates that we do away with regular brakes completely. For normal operation the electric recovery can work fine. There needs to be a compact parking brake, preferably mechanically activated that locks the wheel when it is stopped already for either parking or walking. In addition, I would like to see a mechanically operated contactor that can directly short out the drive motors-this would function as an excellent emergency brake to quickly bring the car down to a crawl speed.
Mechanics
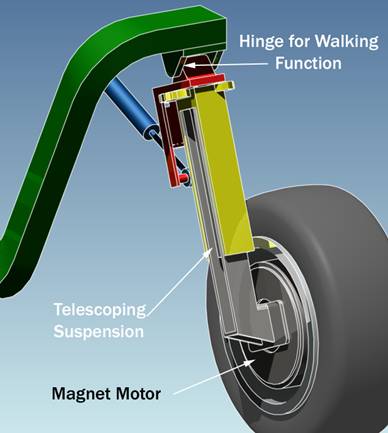
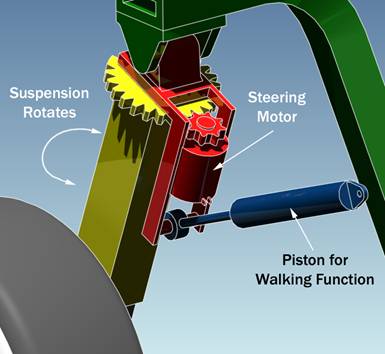
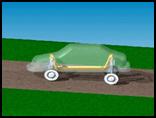
For steering, the upper suspension (yellow) is rotated by the steering motor (red). To make the car walk, the steering motor and bracket (both red) are free to swing forward and backward, being pushed or pulled by the walking piston (blue), which would be attached on the other end to the frame. There is a two way hydraulic cylinder inside of the telescoping suspension (grey and yellow) to push the wheel down and pull it up. There would be power cables going to the wheel motors and hydraulic lines or wires to the steering motors (depending if electric or hydraulic motors are chosen) that would need to be robust yet flexible, with an appropriate harness system to keep the cables out of the way of the turning wheel.
Applications
 Parallel Parking
(view windows
video )(view mp4 video)
Parallel Parking
(view windows
video )(view mp4 video)
This video shows a useful combination of 4ws and hydraulics. To quickly parallel park in a spot with very little room on either side, the car stops and turns its wheels 90 degrees while lifting the car somewhat to prevent the wheels from hitting the inside of the wheel wells at the extreme end of the wheels rotation. Then it slides straight into the spot, turns its wheels back to being straight, and lowers the car to rest. This type of movement would also be useful for adjusting the cars position in a spot without having to backup and then pull back in.
 Tight
Turns (view
windows video)(view mp4
video)
Tight
Turns (view
windows video)(view mp4
video)
An example of 4ws as is possible with the magnet motor design. Observe the wheels facing the inside of the corner turn more than the outside wheels. Each wheel is perpendicular to the center of the turn. By turning the steering wheel further and further, the inside wheels could turn more and more dramatically in relation to the outside wheels, bringing the center of the cars rotation to the center of the car, so one could spin the car around in place without moving forward or backward. Large vehicles would especially benefit from this, like large fire trucks, RVs, and buses. These would be able to maneuver in much tighter quarters, make u-turns in streets only as wide as the vehicle, and make turns around corners without having to pull way out into the street or risk running over the curb.
 Incline
compensation (view windows video)(view mp4 video)
Incline
compensation (view windows video)(view mp4 video)
The hydraulic suspension could be used to at least partially compensate for driving on steep inclines, particularly driving on the sides of steep hills, a situation that off road vehicles encounter. A vehicle like a Jeep is much more likely to roll to a side than backward or forward, and a feature like this would reduce the likelihood of a roll. This feature may also be integrated into a luxury car, as a way to smooth out a ride. A similar example of how to smooth a ride using the hydraulic system is to compensate for sharp turns, or turns at high speed that aren’t optimally banked. To do this the suspension would lift the side of the car on the outside of the turn and lower the side of car on the inside of the turn. An algorithm side based on speed and the abruptness of the corner (or an accelerometer system in the car) would tell the suspension how much to raise and lower each side, in order to keep the center of gravity of the passengers centered in the car.
 Walking: By being
able to lock the wheels and swing each wheel/suspension assembly independently,
the 4WF car transforms into a powerful off-road vehicle, making it easier to
navigate undeveloped terrain, and climb over obstacles. The
gait could be controlled either by computer or by the driver, or any mixture of
both. A possible driver interface that would be very intuitive is one
where the controller resembled a model of the four wheels, each attached to an
extendable lever that the driver could manipulate with their hands, with car
reproducing the movements of a model wheel in the real world. Some
applications for a walking car are search and rescue operations, military
vehicles, forestry departments, recreational off road vehicles, or even
unmanned land rovers for space exploration.
Walking: By being
able to lock the wheels and swing each wheel/suspension assembly independently,
the 4WF car transforms into a powerful off-road vehicle, making it easier to
navigate undeveloped terrain, and climb over obstacles. The
gait could be controlled either by computer or by the driver, or any mixture of
both. A possible driver interface that would be very intuitive is one
where the controller resembled a model of the four wheels, each attached to an
extendable lever that the driver could manipulate with their hands, with car
reproducing the movements of a model wheel in the real world. Some
applications for a walking car are search and rescue operations, military
vehicles, forestry departments, recreational off road vehicles, or even
unmanned land rovers for space exploration.
Others:
In case of a flood, the hydraulics could lift the car to its limits to give it extra ground clearance. The same would work for heavy snow, mud, and rough terrain where there is a danger of bottoming out. Also lifting the vehicle would give a better view of a traffic situation (Emergency vehicles in urban areas would benefit from this).

Why Now?
4ws is not a new idea, and engineers have been trying to make a comfortable suspension system since the days of horses and buggies. The element that makes these combinations innovative is the relatively recent development of powerful electric motors that are small enough to fit in the hub of an automobile. Current designs being used in the real world (see the magnet motor public bus at http://www.magnet-motor.de/) are made using permanent rare earth magnets, but within the next twenty years room temperature super conductivity will become a reality. In the area of electric motors, superconductivity will affect the size and efficiency of electromagnets, which will in turn make it possible to produce electric motors that are smaller, more powerful, and very power efficient. In addition, with oil becoming more scarce and harder to extract (bottom line: more expensive) and with inevitably coming stricter automobile emissions standards, the days of the primarily gasoline car are numbered, and interests will shift to the electric automobile.
Contact ron2007@applied design.com only put a dash in between applied and design.
Copyright 2007 Applied Design Laboratories, Inc.